ʻO ka Robot Welding Mig Kiʻekiʻe Kina no ka Welding Stainless Steel







Kino Lopako
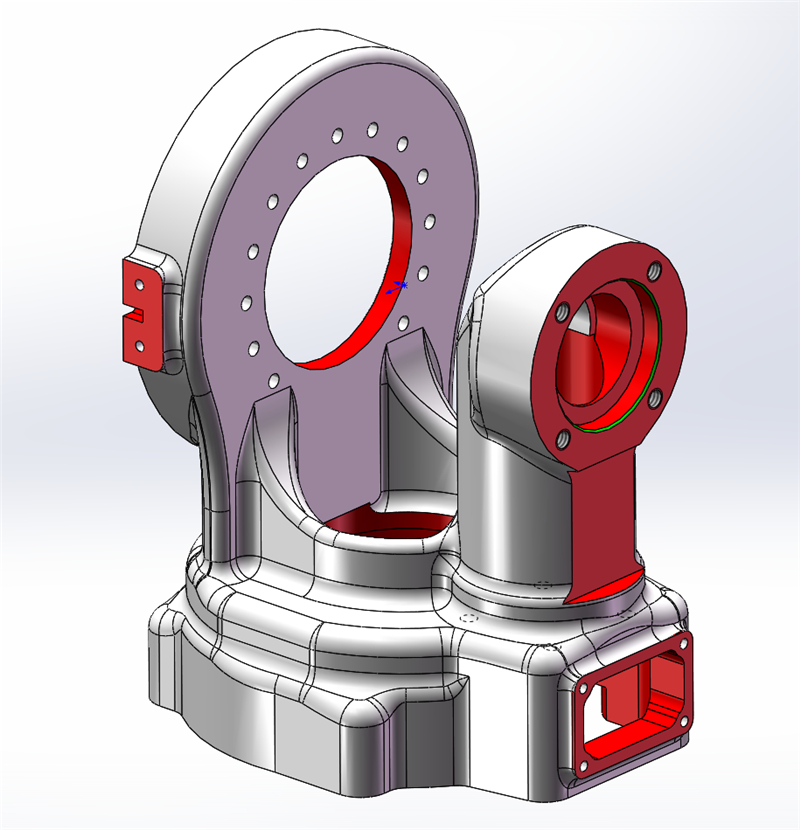
Hoʻololi nui ka lopako JHY i ke kaʻina hana make-casting a me ka hoʻolālā kikoʻī o ke kino, Ua hana kā mākou hui R&D i nā mea hou he nui i ka hoʻolālā ʻana o ke kino lopako, nona nā palapala Sila Nui hou he ʻumi.
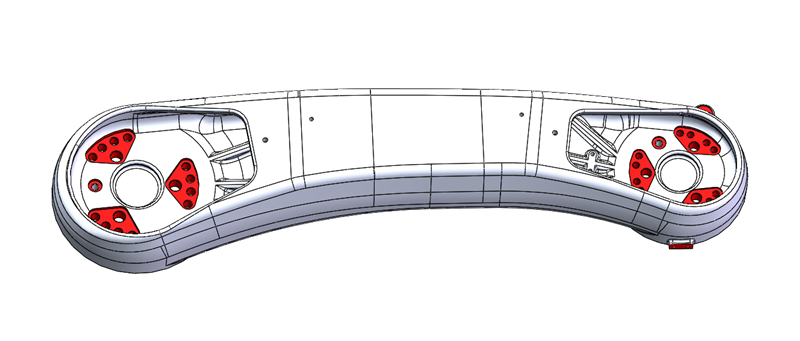
No ka laʻana, ua hoʻomohala ke koʻokoʻo ʻeono i kahi ʻano hoʻoili kiʻekiʻe a ua hoʻolālā i nā kaola hoʻoikaika, a ua hoʻohana pū ka disc hoʻopuka huila ʻeono i ka hoʻolālā gearless, kahi i hoʻomaikaʻi nui ai i ka pololei a me ke kūpaʻa o ka robot. ʻOiai inā hana ka lama wili i kahi ʻano paʻakikī, hiki nō iā ia ke hōʻoia i ke kūpaʻa a me ka haʻalulu ʻole. Ua hōʻoia ʻia kēia manaʻo e kā mākou mea kūʻai kūloko.
Hana ʻia ke kino robot e ka ʻenehana die-casting, ʻoi aku ka māmā o kā mākou mau robots me ka nui o ka density. Hiki i ka lima mua ke ʻoi aku ka wili a me ka lōʻihi, ʻoi aku ka kokoke o ka lakio ma waena o ka lima o luna a me ka lima mua i ka lakio gula, no laila e neʻe ana me ka maʻalahi a me ka wikiwiki.
Hoʻolālā Hoʻolālā
ʻOi aku ka maʻalahi a me ka nani o ka hoʻolālā lima mua o ka robot pololei. Me ka manaʻo o ka hoʻolālā, ʻoi aku ka kūlike me ka nani o ka mākeke ʻEulopa. Ua noi ka hoʻolālā kino robot no kekahi mau palapala Sila Nui loea, ʻoi aku ka hemolele o ke kino robot hou.
ʻO ka Lama Kiʻekiʻe o nā Uea
Hana ʻia nā uea kūloko a me nā kikowaena o ka lopako e nā lama Kepani kiʻekiʻe: DYEDEN, TAIYO, e like me ABB lāua ʻo Fanuc.
Kikowaena: ʻO ka lama Yierma Italia.
Nā Lama Alakaʻi o Servo Motor / Driver / Reducer
Hoʻohana lākou a pau i nā lama alakaʻi ma Kina. Ua hoʻāʻo ʻia a noiʻi ʻia kēlā me kēia lama no ka manawa lōʻihi ma mua o ka hoʻoholo hope loa ʻana, i mea e hōʻoia ai he kūpono kēia mau lama no ka hoʻohana ʻana i kā mākou mau robots a he paʻa a hilinaʻi hoʻi ko lākou maikaʻi a me ka hana.
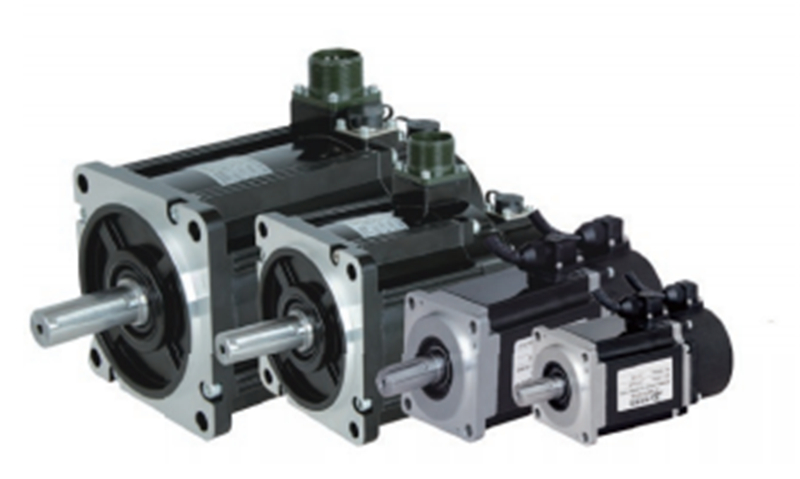
Hoʻohana ka axis J1 a me J2 i ka hoʻolālā ʻana o ʻekolu mau ʻau eccentric me ka torque a hiki i ka 65 Nm e hōʻemi ana i ke komo ʻana o ke kia a hoʻonui i ke ola lawelawe o ka reducer. ʻO nā mea hoʻemi axis JHY robot J1 a me J3 i kēia manawa ka hoʻonohonoho kiʻekiʻe loa ma Kina.
E pili ana i ka motika servo, I kēia manawa ke hoʻohana nei mākou i ka motika 3kw ma ka hapa nui no nā robots.
No nā lopako 1.8m a me 2m, ʻoi aku ka nui o ka ikaika hoʻokele e pono ai no nā koʻi 1 a me 2, a ʻoi aku ke kiʻekiʻe o nā koi no ka mana motika.
Hiki i nā motika kiʻekiʻe a me nā kikoʻī he nui ke hoʻokō piha i nā koi noi no kā mākou lopako.

3 makahiki/7500h ʻAʻohe mālama
He maʻalahi ka mālama ʻana, hiki i nā mea kūʻai ke hana maʻalahi.
Nā Palapala Sila Nui ʻē aʻe a me nā Hoʻolālā
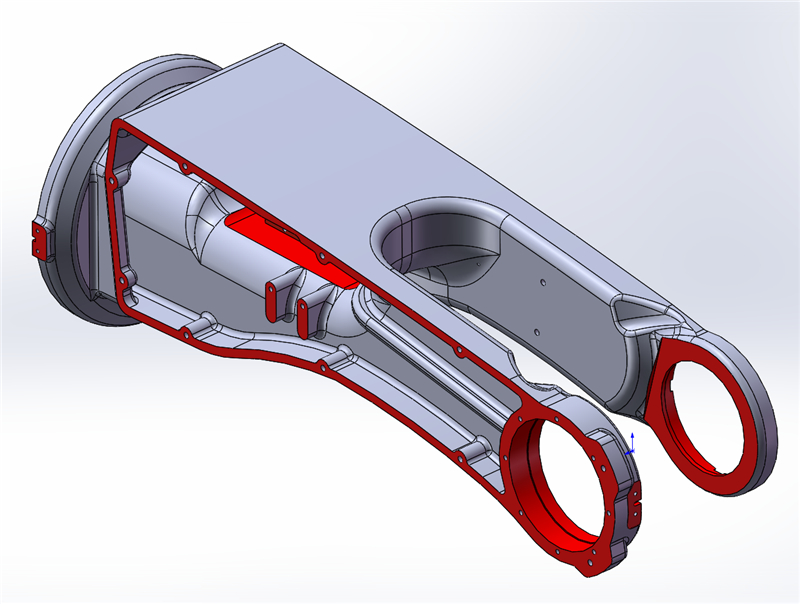
Ua hoʻololi ʻia ka hoʻoili lua 6-axis i ʻelua mau pilina kāʻei, hoʻonui i ka lakio hoʻoili, a hoʻoponopono i ka pilikia o ka neʻe wikiwiki ʻana o 6-axis a pololei ʻole. Ua hoʻolālā ʻia ka disc hoʻopuka axis ʻeono me ka ʻole o nā kia, me ka mīkini hoʻoili kiʻekiʻe, kahi e hoʻomaikaʻi ai i ka pololei o ka neʻe ʻana o ka axis ʻeono... I kēia manawa, loaʻa iā mākou ma mua o 30 mau palapala Sila Nui e pili ana no ka robot wili.
Wikiō
Nā palena
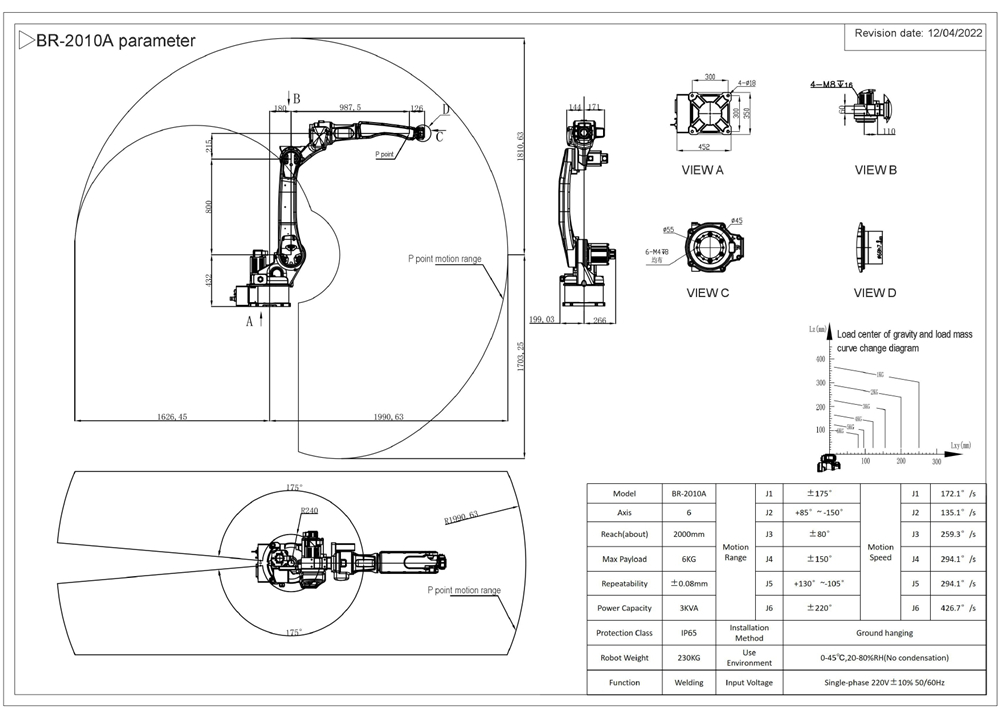
| Hoʻohālike | BR-2010A | Ka Pae Neʻe | J1 | ±175° | Ka wikiwiki o ka neʻe ʻana | J1 | 172.1°/s |
| ʻAkisi | 6 | J2 | +85°~ -150° | J2 | 135.1°/s | ||
| Hōʻea (e pili ana) | 2000mm | J3 | ±80° | J3 | 259.3°/s | ||
| Ukana Loa | 6KG | J4 | ±150° | J4 | 294.1°/s | ||
| Ka hana hou ʻana | ±0.08mm | J5 | +130°~-105° | J5 | 294.1°/s | ||
| Ka Mana Mana | 3KVA | J6 | ±220° | J6 | 426.7°/s | ||
| Papa Hoʻomalu | IP65 | ʻAno Hoʻokomo | Kau ʻia ma ka honua | ||||
| Kaumaha Robot | 230KG | E hoʻohana i ke kaiapuni | 0-45℃,20-80% RH (ʻAʻohe condensation) | ||||
| Hana | Kuʻihao | Anakahi Hoʻokomo | Pae hoʻokahi 220V±10% 50/60Hz | ||||
Nā māhele huahana
-

6 Axis Low Spatter MIG Welding Robot Range 1800mm
-

6 Axis MIG MAG Welding Robot Range 1500mm Me ...
-

ʻO ka lopako kuʻihao kiʻekiʻe i hoʻohana ʻia no ka kuʻihao ʻana i nā lako
-

JHY 6 axis lopako lima hanalima akomi piʻo m ...
-

2000mm hiki i ka lopako kuʻihao no ka kuʻihao kalapona s ...
-

ʻO ka lopako kuʻihao MIG me ka laulā 2000mm no nā stainles ...